

Presenter(s)
Tanner Rolfe
Files
Download Project (2.1 MB)
Description
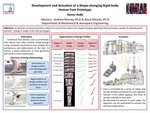
This project focuses on the actuation of a multi-segment rigid body foot prototype capable of matching the change in profile of a human foot during gait. Previous work has focused on the design of the prototype using methods of shape-changing kinematic synthesis. In order to actuate the prototype, a tendon-based actuation scheme was conceived and partially implemented. The current prototype includes a series of paired cables, each connected to a separate segment of the foot. Tension in the cables counteracts the force of torsional springs implemented at the joints keeping the segments positioned in a neutral configuration, allowing each segment to achieve appropriate plantar- and dorsiflexion to match gait-derived configurations. Current work focuses on implementing active elements to drive the cables, as well as refinement of joint stiffness to increase the functionality and biomechanical accuracy of the prototype.
Publication Date
4-18-2018
Project Designation
Graduate Research
Primary Advisor
Andrew P. Murray, Dave Harry Myszka
Primary Advisor's Department
Mechanical and Aerospace Engineering
Keywords
Stander Symposium project
Recommended Citation
"Development and Actuation of a Shape-changing Rigid-body Human Foot Prototype" (2018). Stander Symposium Projects. 1302.
https://ecommons.udayton.edu/stander_posters/1302
