

Presenter(s)
Ajith Kumar Veeraboina
Files
Download Project (76.5 MB)
Description
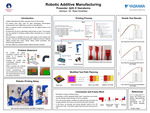
Additive manufacturing (AM) is a technology that produces a physical part directlyfrom its corresponding digital 3D model design. AM technology has been widely used in manyfields for rapid prototyping. Technological advancements in AM have shifted its purpose tomanufacturing. However, when compared to traditional manufacturing, AM is a slow process.So, the fabrication process speed must be improved by developing new mechanisms and slicingalgorithms and a model can be printed faster without sacrificing the surface quality and itsmechanical properties. Moreover, the 3D part fabrication time is dependent on the CAD model’scomplexity, such as overhanging structures. Most of the commercial 3D printers are based on agantry system, so printing such complex models requires support structures. So, it takes moretime and material to print both the support and the actual part. Therefore, developing multi-directional tool-path algorithms can minimize fabrication time. However, such algorithms canbe implemented only with a higher degree of freedom (DOF) mechanism, like industrial roboticarms. In this report, we have discussed about printing process architecture with a one six DOFmanipulator and testing a novel tool-path planning to improve mechanical properties with smoothsurface quality. Tensile tests are performed as per the ASTM D638-20 standards.
Publication Date
4-19-2023
Project Designation
Graduate Research
Primary Advisor
Raul Ordonez, Robert Lowe, Amy Neidhard-Doll
Primary Advisor's Department
Electrical and Computer Engineering
Keywords
Stander Symposium, School of Engineering
Recommended Citation
"Robotic Additive Manufacturing" (2023). Stander Symposium Projects. 2918.
https://ecommons.udayton.edu/stander_posters/2918

Comments
Presentation: 1:15-2:30 p.m., Kennedy Union Ballroom