

Presenter(s)
Chong Chen
Files
Download Project (259 KB)
Description
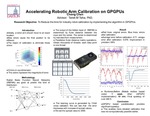
We examine the acceleration of a robotic arm calibration algorithm using a general purpose GPU (GPGPU). The algorithm utilized requires a radial basis function neural network for calibration and takes approximately 9 days to run on a standard desktop computer. The most time consuming component of this algorithm is a matrix inversion operation. This is carried out on an NVIDIA GPGPU using the Cholesky Factorization. On an NVIDIA Tesla S1070 GPGPU, this same algorithm ran about 300 times faster than a standard desktop computer running an optimized version of the code.
Publication Date
4-18-2012
Project Designation
Graduate Research
Primary Advisor
Tarek M. Taha
Primary Advisor's Department
Electrical and Computer Engineering
Keywords
Stander Symposium project
Recommended Citation
"Accelerating Robotic Arm Calibration on GPGPUs" (2012). Stander Symposium Projects. 44.
https://ecommons.udayton.edu/stander_posters/44
