

Presenter(s)
Patrick B. Hudak, Kyle Naumann, Bailey A. Reid
Files
Download Project (989 KB)
Description
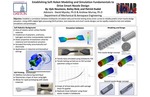
Soft robotics is a rapidly growing field with numerous possible applications. In grinding applications, coolant flow must be perfectly directed onto a part to prevent defects. Frequent, manual adjustments must be performed by operators, generally by bending hard tubing. By developing a smart-hose that is controlled by varying the air pressure in a series of internal chambers, machine operators can make fine adjustments to the coolant flow without entering the machine's workspace and interrupting the process. To do so, fundamentals of modeling and simulation in Solidworks using real-world material data must be established. This is done by comparing tensile testing data from physical specimens with results from Solidworks simulations of the same test using a finite element analysis to determine if a correlation is present between the two stress-strain curves. Establishing this correlation is important for determining if Solidworks accurately simulates the behavior of the material used. If a strong correlation is found, simulations in Solidworks can be run with a high degree of confidence that they will reflect the behavior of the physical actuator made out of our researched materials. The design process can be accelerated through accurate simulation by allowing for rapid and frequent iteration and simulation without needing to physically test the actuators. A wider variety of designs can also be tested in parallel, further enabling more rapid design and exploration of different styles of actuators. Ultimately, establishment of modeling and design fundamentals will result in a smart-hose design capable of being manufactured and deployed effectively in real-world applications.
Publication Date
4-20-2022
Project Designation
Independent Research
Primary Advisor
Andrew P. Murray, Dave Harry Myszka
Primary Advisor's Department
Mechanical and Aerospace Engineering
Keywords
Stander Symposium project, School of Engineering
United Nations Sustainable Development Goals
Industry, Innovation, and Infrastructure
Recommended Citation
"Establishing Soft Robot Modeling and Simulation Fundamentals to Drive Smart Hose Design" (2022). Stander Symposium Projects. 2760.
https://ecommons.udayton.edu/stander_posters/2760

Comments
Presentation: 1:15 p.m.-2:30 p.m., Kennedy Union Ballroom