

Presenter(s)
Bingjue Li
Files
Download Project (916 KB)
Description
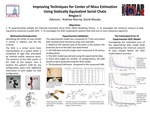
Any articulated system of rigid bodies defines a statically equivalent serial chain (SESC). The SESC is a virtual chain that terminates at the center of mass (CoM) of the articulated system. Moreover, this chain moves as the joints in the system move thereby keeping its terminus at the CoM. A SESC may be generated knowing only the types of joints in a system and the manner in which they are connected. The parameters in the SESC may then be determined from joint readings and the corresponding (projection of the) CoM location. The number of data points needed to determine the SESC parameters is linear in the number of joints in the articulated system. Three developments toward recognizing the SESC as a practical modeling technique are presented. First, a SESC is developed via experimentation for a spatial system. Second, a prediction for the number of readings to determine the SESC parameters in the presence of errors in joint readings and CoM locations is developed. Finally, a method for generating the parameters of the SESC in light of one body in the chain being fixed to ground is presented so long as the fixed body is the same as or the mirror image of a second body in the chain. This final development is useful in the study of humans or humanoids where one foot is typically left on the ground during balancing.
Publication Date
4-17-2013
Project Designation
Graduate Research
Primary Advisor
Andrew P. Murray
Primary Advisor's Department
Mechanical and Aerospace Engineering
Keywords
Stander Symposium project
Recommended Citation
"Improving the Techniques for Center of Mass Estimation Using Statically Equivalent Serial Chain Modeling" (2013). Stander Symposium Projects. 291.
https://ecommons.udayton.edu/stander_posters/291
