

Presenter(s)
Tanner Nicholas Rolfe
Files
Download Project (2.0 MB)
Description
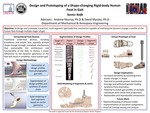
This project focuses on the design and prototyping of a practical, multi-segment rigid body foot mechanism capable of matching the dynamic change in profile of a human foot throughout multiple stages of gait. Dynamic models of the human foot often replicate the physiological change in shape of the foot during gait using compliant mechanisms. While rigid body foot models exist, these models are often simplified as single-segment bodies incapable of accurately representing the geometry and kinematics of the human foot. Multi-segment rigid body systems offer certain advantages over compliant systems which may be desirable in the design of ankle-foot devices, including the ability to withstand greater loading, the ability to achieve more drastic shape change, and the ability to be synthesized from the kinematics, allowing for realistic functionality without consideration of the complex internal kinetics of the human foot.
Publication Date
4-5-2017
Project Designation
Honors Thesis - Undergraduate
Primary Advisor
Andrew P. Murray, David H. Myszka
Primary Advisor's Department
Mechanical and Aerospace Engineering
Keywords
Stander Symposium project
Recommended Citation
"Design and Prototyping of a Shape-changing Rigid-body Human Foot in Gait" (2017). Stander Symposium Projects. 887.
https://ecommons.udayton.edu/stander_posters/887
