

Presenter(s)
Kevin S. Giaier
Files
Download Project (873 KB)
Description
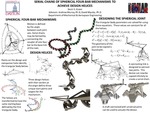
This research presents a methodology for designing mechanical chains comprised of a large number of identical spherical four-bar mechanisms. Such a mechanical chain can achieve up to five prescribed helices. A spherical four-bar mechanism is a single degree of freedom device consisting of four revolute (R) joints whose rotational axes intersect at a common point. The mechanical chains are created by connecting the coupler of the prior spherical mechanism to the base link of the subsequent spherical mechanism. An extension on each mechanism will lie along the prescribed helices as the device moves. The methodology introduces a companion helix to each prescribed helix along which the intersection locations of each spherical mechanism's axes must lie. As the mechanisms are connected by rigid links, the distance between the intersection locations along each companion helix is the same. Additionally, an approach to actuating this mechanical chain with a single rotating input is presented.
Publication Date
4-9-2014
Project Designation
Graduate Research
Primary Advisor
David Myszka and Andrew Murray
Primary Advisor's Department
Mechanical and Aerospace Engineering
Keywords
Stander Symposium project
Disciplines
Arts and Humanities | Business | Education | Engineering | Life Sciences | Medicine and Health Sciences | Physical Sciences and Mathematics | Social and Behavioral Sciences
Recommended Citation
"Serial Chains of Spherical Four-Bar Mechanisms to Achieve Design Helices" (2014). Stander Symposium Projects. 513.
https://ecommons.udayton.edu/stander_posters/513
Included in
Arts and Humanities Commons, Business Commons, Education Commons, Engineering Commons, Life Sciences Commons, Medicine and Health Sciences Commons, Physical Sciences and Mathematics Commons, Social and Behavioral Sciences Commons
