

Presenter(s)
Hameed Juma
Files
Download Project (335 KB)
Description
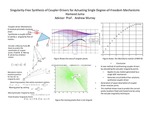
The goal of this research is to advance the synthesis methodology for designing coupler-drivers for actuating single degree of freedom mechanisms. A planar coupler-driver is a chain consisting of a fixed revolute joint, an actuated prismatic joint, and a moving revolute joint connected to an ideal location on a previously synthesized planar mechanism. Although such a chain may be connected between any fixed point and any moving point on the mechanism, the synthesis challenge is determining the locations of these points such that the mechanism moves over its desired range of motion without reaching a singularity. A singularity is a configuration of the mechanism at which it ceases to move. A spatial coupler-driver is defined by a chain consisting of a fixed spherical joint, an actuated prismatic joint, and a moving spherical joint connected to an ideal location on a previously synthesized spatial mechanism. This work addresses both planar and spatial coupler-drivers and uncovers challenges unique to each case.
Publication Date
4-9-2014
Project Designation
Independent Research
Primary Advisor
Andrew Murray
Primary Advisor's Department
Mechanical and Aerospace Engineering
Keywords
Stander Symposium project
Disciplines
Arts and Humanities | Business | Education | Engineering | Life Sciences | Medicine and Health Sciences | Physical Sciences and Mathematics | Social and Behavioral Sciences
Recommended Citation
"Singularity-Free Synthesis of Coupler-Drivers for Actuating Single Degree-of-Freedom Mechanisms" (2014). Stander Symposium Projects. 512.
https://ecommons.udayton.edu/stander_posters/512
Included in
Arts and Humanities Commons, Business Commons, Education Commons, Engineering Commons, Life Sciences Commons, Medicine and Health Sciences Commons, Physical Sciences and Mathematics Commons, Social and Behavioral Sciences Commons
